corporate body
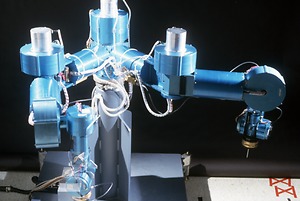
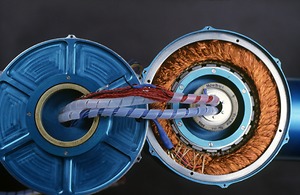
Direct Drive Arm (Robot)
Related items of Direct Drive Arm (Robot)
-

photographs, color photographs
-

robots
-
moving images
-
photographs, color photographs
-

photographs, color photographs
-

moving images
-
photographs, color photographs
-

annual reports